Research Projects
Medical Robotics | Assistive Robotics | Algorithmic Foundations | Medical Simulation | Image Guidance
Medical Robotics
 Motion Planning for Medical Steerable Needles
Motion Planning for Medical Steerable Needles
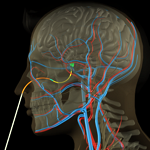
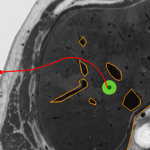
Steerable needles are a new class of flexible medical needles capable of being controlled along curved paths through soft tissue. We are developing motion planning algorithms to automatically steer these needles around anatomical obstacles to previously unreachable targets. Motion planning for needle steering is complicated by nonholonomic constraints, tissue deformations, and uncertainty in needle/tissue interaction forces. We combine physically-based simulation, uncertainty modeling, and control theory to compute optimal plans. (More)
 Motion Planning for Concentric Tube Robots
Motion Planning for Concentric Tube Robots
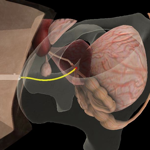
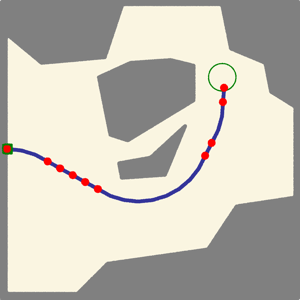
Concentric tube robots are tentacle-like medical instruments composed of thin, pre-curved, telescoping tubes. These instruments can follow curved, winding paths through open cavities and soft tissues to reach targets in constrained spaces, enabling minimally-invasive access to previously unreachable sites. We are developing new planning algorithms to compute optimal motions for these devices to reach clinician-specified targets while avoiding anatomical obstacles, which is challenging due to the instruments' geometry and mechanics. (More)
Assistive Robotics
 Lab Automation
Lab Automation
Laboratories in chemistry, biochemistry, and materials science are at the leading edge of technology, discovering molecules and materials to unlock capabilities in energy, catalysis, biotechnology, sustainability, electronics, and more. We are developing robots and software frameworks to transform science labs into automated factories of discovery that accelerate scientific progress. (More)
 Demonstration-Guided Motion Planning for Robotic Assistance
Demonstration-Guided Motion Planning for Robotic Assistance
With new algorithms and software, emerging personal robots have the potential to assist people with tasks of daily living, including helping elderly and disabled individuals who have limited mobility. We introduce demonstration-guided motion planning (DGMP), a new approach for planning motions for personal robots to perform assistive tasks. The approach combines learning from demonstrations with sampling-based motion planning to enable robots to avoid previously unseen obstacles in the workspace while satisfying task constraints. (More)
 Cloud-based Computation for Robot Motion Planning
Cloud-based Computation for Robot Motion Planning
To meet the requirements of an interactive and dynamic scenario, robot motion planning may need more computing power than is available on robots designed for reduced weight and power consumption (e.g., battery powered mobile robots). Cloud-based computing offers a vast amount of low-cost computation power on-demand. We introduce a method for splitting the computation of a robot’s motion plan between the robot’s low-power embedded computer, and a high-performance cloud-based compute service. (More)
 Fast Motion Planning Using Parallelization on Multi-core CPUs
Fast Motion Planning Using Parallelization on Multi-core CPUs
Most modern PCs and mobile devices have between 2 and 32 processing cores, and that number is increasing. We have developed PRRT (Parallel RRT) and PRRT* (Parallel RRT*), sampling-based methods for feasible and optimal motion planning that are tailored to execute on modern multi-core CPUs. These methods explicitly leverage parallel, multi-core architectures to introduce substantial speedups in motion planning. (More)
Algorithmic Foundations
 Motion Planning under Uncertainty using Optimization in Belief Space
Motion Planning under Uncertainty using Optimization in Belief Space
As a robot moves, uncertainty may arise in (1) the robot’s motion due to unmodeled or unpredictable external forces, and (2) the robot’s sensing of its state due to noisy or incomplete sensor measurements. Consequently, the robot often cannot directly observe its current state but instead can estimate a distribution over the set of possible states (i.e., its belief state). We are developing new motion planners that compute locally optimal solutions in the belief space of the robot to plan motions such that the expected cost (e.g., time, fuel) is minimized. (More)
 Motion Planning under Uncertainty in Highly Deformable Environments
Motion Planning under Uncertainty in Highly Deformable Environments
Many tasks in robot-assisted surgery, food handling, manufacturing, and other applications require planning and controlling the motions of robots that interact with deformable objects. We present an approach for motion planning under uncertainty in deformable environments that maximizes probability of success by accounting for uncertainty in deformation models, noisy sensing, and unpredictable actuation. Our method combines simulation and optimal control to numerically estimate uncertainty distributions and select an optimal plan. (More)
 Motion Planning under Uncertainty: The Stochastic Motion Roadmap
Motion Planning under Uncertainty: The Stochastic Motion Roadmap
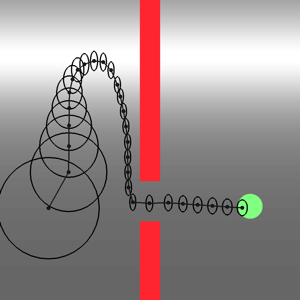
The Stochastic Motion Roadmap (SMR) is a framework for robot motion planning that explicitly considers uncertainty in robot motion to maximize the probability of avoiding collisions and successfully reaching a goal. The method combines a sampling-based roadmap representation of the configuration space with Markov decision processes and dynamic programming. Resulting plans are more likely to succeed than deterministic shortest path plans, particularly in medical applications like needle steering in which uncertainty in motion is high. (More)
Medical Simulation
 Simulating Needle Insertion for Physician Training and Planning
Simulating Needle Insertion for Physician Training and Planning
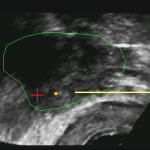
Medical procedures such as biopsies, anesthesia injections, and brachytherapy require inserting a needle to a target inside soft tissue. These procedures are prone to significant error due to tissue deformations caused by the needle. We are developing an efficient, physically-based, interactive simulation of the tissue deformations that occur during the insertion of traditional and steerable needles into soft tissue. The simulation can be used for both physician training and automatic planning to compensate for errors caused by deformations. (More)
Image Guidance
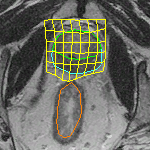 Image Registration of Deformable Tissues using Physics-based Models
Image Registration of Deformable Tissues using Physics-based Models
Physically-based simulations can improve the quality of registration of medical images by introducing context information that is not present in the matrices of pixel intensities that typically define images. We are developing image registration algorithms that achieve high accuracy by combining physics-based models of tissue deformation with optimization algorithms. Our methods have the potential to enable more precise radiation treatments for cancer and also facilitate guidance of medical instruments to clinical targets. (More)
 Optimizing Radiation Dose for Brachytherapy Cancer Treatment
Optimizing Radiation Dose for Brachytherapy Cancer Treatment
In high-dose-rate brachytherapy, physicians treat cancer by moving a small radioactive source through hollow catheters pre-implanted near cancerous cells. By controlling the dwell time of the source at various positions, clinicians can generate a wide variety of dose distributions. We formulated the brachytherapy planning problem as a linear program. This enabled, for the first time, fast computation of source motions that yield dose distributions that optimally satisfy physician specified dose constraints. (More)
 Image Matching and Occlusion Detection in Deformable Scenes
Image Matching and Occlusion Detection in Deformable Scenes
Deformations arise in a variety of scenes, from medical images to animals in motion to cloth blowing in the wind. We introduce novel topological image processing algorithms designed to consider deforming scenes to address two fundamental image processing problems: image matching and occlusion detection. We introduce a new local photometric descriptor for image matching that is robust to deformations and noise. We also employ topological invariants to reliably detect occlusions. (More)