Toward Automating Surgical Tasks
Medical robotic systems have the potential to greatly enhance physician performance and enable minimally invasive access to previously unreachable surgical sites. New systems range from robotic manipulators that can perform delicate endoscopic surgery to steerable needles that can bend around anatomical obstacles. However, current medical robots lack autonomy and require direct control by physicians via tele-operation. As medical robots become smaller, less invasive, and more complex, they also become harder to control via human dexterity and intuition; new algorithms are needed to enable physicians to more quickly harness the full potential of devices as they emerge.
We are developing a new motion planning framework for medical robots that combines automatic planning algorithms, robot control, and human oversight to enable new and safer robotic procedures that are beyond current clinical capabilities. Increasing autonomy can improve the speed, accuracy, and precision of existing procedures and enable entirely new classes of procedures that require dexterity and control beyond the capability of a human operator. Increasing autonomy can also reduce surgical errors by enabling physicians to focus on high-level tasks rather than low-level motion control.
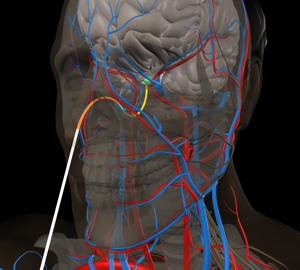
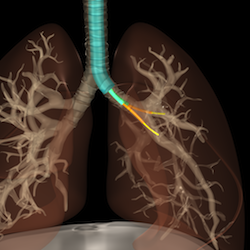
Creating motion planning algorithms for medical robots requires addressing key challenges that arise in medical applications: the algorithms must simultaneously consider deformations of soft tissues, compensate for uncertainty due to patient variability, guarantee safety by avoiding critical tissues like nerves and arteries, and integrate physician expertise into the planning process. We are investigating methods to address these challenges through basic research into new algorithms that integrate physically-based simulation of tissue/device interactions with optimal control, consider sensing and robot motion simultaneously, optimize plans by efficiently computing solutions to path-focused partially observable Markov decision processes, and integrate physician expertise using computational learning methods. Together with clinical collaborators, we are applying our new methods to testbeds inspired by clinical applications with significant societal impact, including prostate cancer treatment using steerable needles, lung cancer diagnosis and treatment using concentric tube robots, and neurosurgery using endoscopic manipulators.