About the Computational Robotics Research Group


Led by Prof. Ron Alterovitz, the Computational Robotics Research Group at UNC-Chapel Hill develops new algorithms and investigates new robot designs to enable physicians to provide better medical care and to assist people in their homes. To enhance robot autonomy and ease of use, we focus on the computational challenge of motion planning: computing actions that will guide a robot around obstacles to accomplish a task, such as reaching a tumor inside the body or cleaning a table. Our algorithms compensate for uncertainty, learn from human experts, integrate data from diverse sources, leverage the power of the cloud, and provide guarantees on safety.
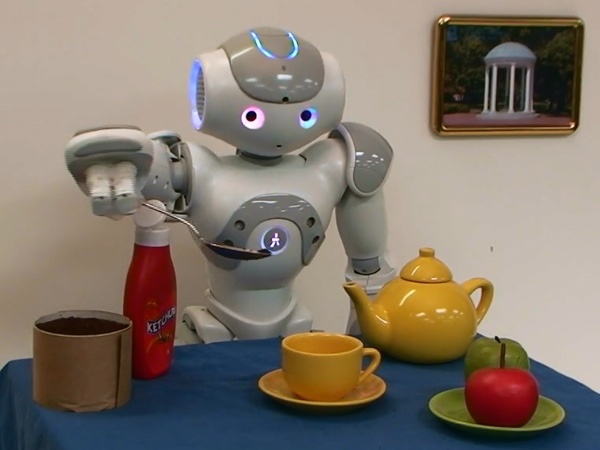
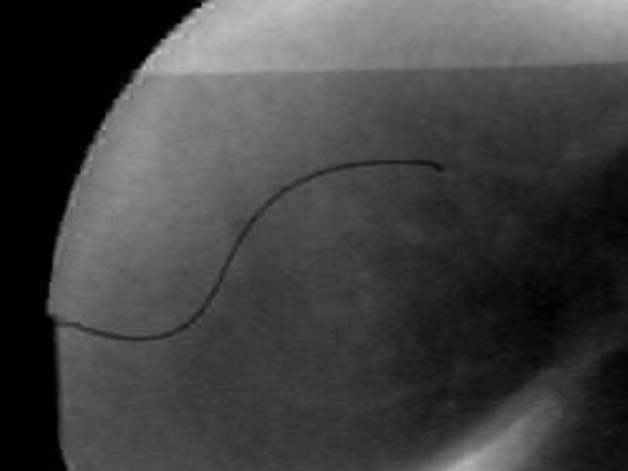
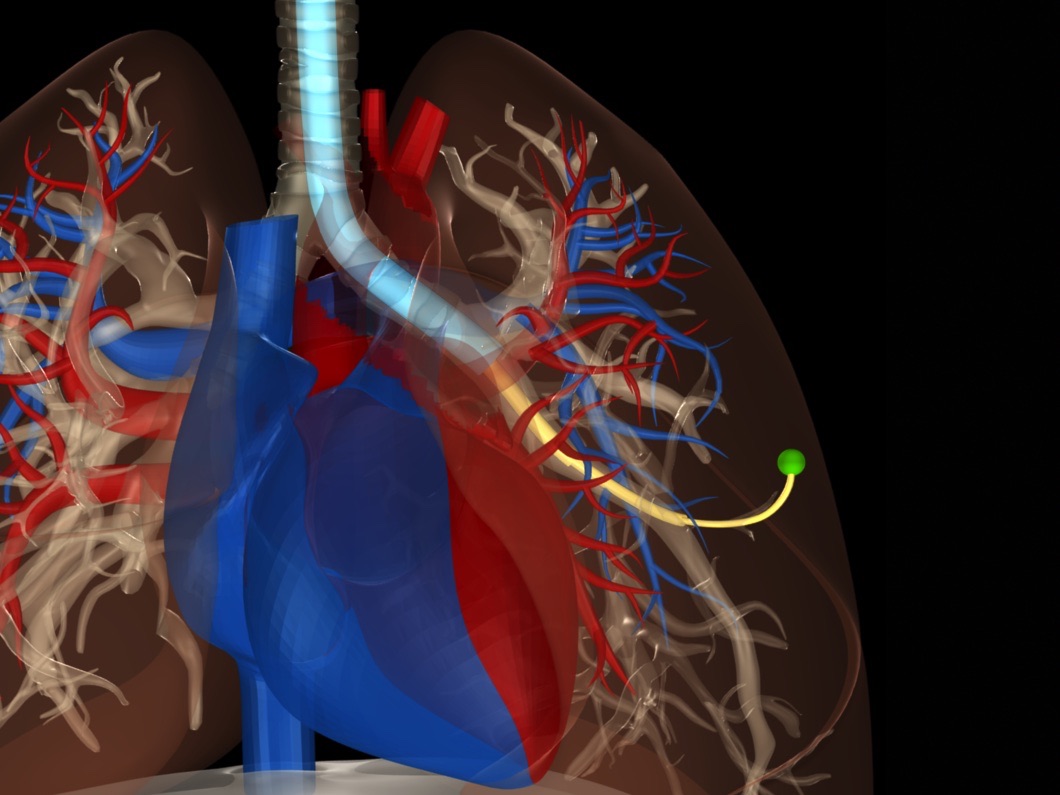
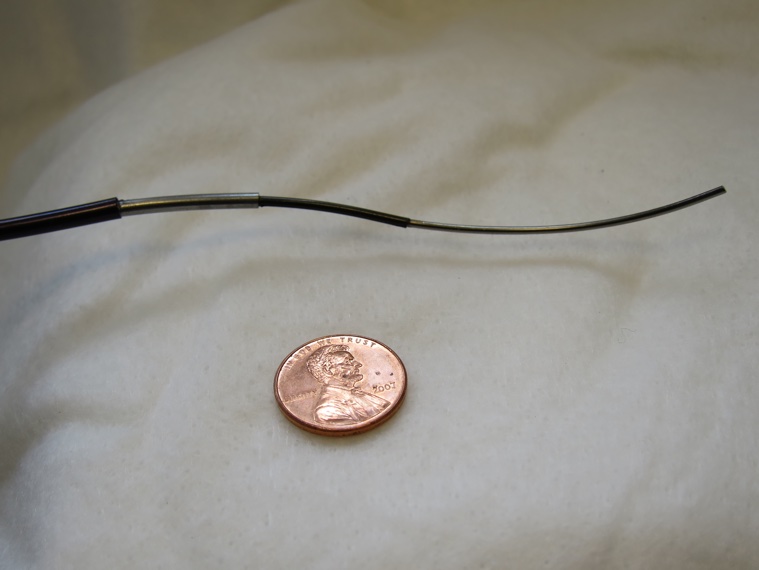
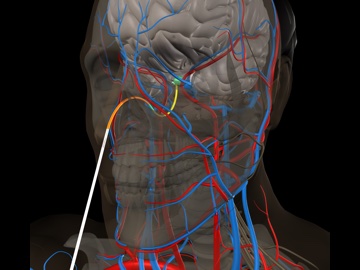
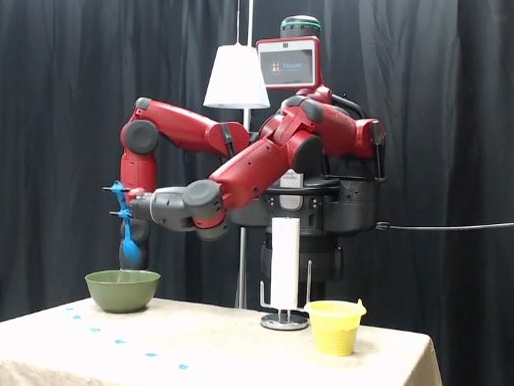
We are applying our new algorithms to emerging, minimally-invasive medical devices such as steerable needles and tentacle-like robots that can bend around anatomical obstacles and provide physicians with access to clinical targets that previously were unreachable without open surgery. Applications include new procedures in neurosurgery, thoracic surgery, and interventional pulmonology. We are also applying our new algorithms to personal robots that can assist people with activities of daily living. Robots capable of learning and performing assistive tasks have the potential to help people who are elderly or disabled to live independently with a higher quality of life.
Our research is supported by the National Science Foundation (NSF) and the National Institutes of Health (NIH).