Recent News
2017
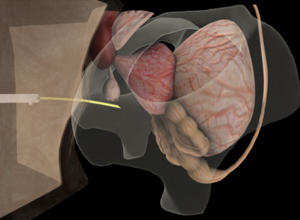
- We receive funding from the National Institutes of Health (NIH) to lead a 4-year project to develop a new robotic system to assist physicians in the early-stage diagnosis of lung cancer (the deadliest cancer in the US). The proposed system integrates a steerable needle into a bronchoscope to overcome limitations of existing technologies and enable physicians to safely access suspected cancer sites throughout the lung for biopsy and treatment.
- Congratulations to Cenk Baykal for winning the Best Paper Award at the Robotics: Science and Systems conference! Our paper on “Asymptotically Optimal Design of Piecewise Cylindrical Robots using Motion Planning” was based on Cenk’s undergraduate honors thesis completed in our research group.
- Our research group's YouTube channel has surpassed 200,000 views!
- A news report on robotics featuring our lab has aired on ABC 11 TV, the ABC TV station serving North Carolina's Research Triangle (Raleigh-Durham-Chapel Hill) and Fayetteville. The news report discussed the capabilities of emerging robots and the potential impact of robotics on careers of the future.
- Congratulations to Qingyu Zhao whose paper was selected for oral presentation (16% acceptance rate) at the 2017 Information Processing in Medical Imaging conference.
- Congratulations to lab alumni Jur van den Berg and Sachin Patil on co-earning the Crunchie Award for Hot New Startup of the year! Both are working on self-driving trucks for Otto, a startup that was recently acquired by Uber.
- Ron Alterovitz is co-organizing the upcoming workshop on C4 Surgical Robots: Continuum, Compliant, Cognitive, and Collaborative, which was selected for inclusion in ICRA 2017 in Singapore. We have an excellent lineup of speakers and look forward to a lively discussion!
2016
- Jeff Ichnowski presents his results on "Cloud-based Motion Plan Computation for Power-Constrained Robots" at the Workshop on the Algorithmic Foundations of Robotics (WAFR) in San Francisco, CA. Also at WAFR, Ron Alterovitz co-organized (with Florian Pokorny and lab alumni Jur van den Berg) an Open Problems Session that featured a lively discussion on open problems proposed by Oren Salzman, Leslie Kaelbling, and Russ Tedrake.
- Qingyu Zhao presents his paper on "The Endoscopogram: A 3D Model Reconstructed from Endoscopic Video Frames" at the Medical Image Computing and Computer Assisted Intervention (MICCAI) conference in Athens, Greece. Only 5% of submissions were presented orally.
-
Ron Alterovitz
 is profiled in The Daily Tar Heel in an article titled: "Professor is the brains behind robots that advance in-home medical assistance." The Daily Tar Heel is an independent student newspaper with an average daily print circulation of 18,000.
is profiled in The Daily Tar Heel in an article titled: "Professor is the brains behind robots that advance in-home medical assistance." The Daily Tar Heel is an independent student newspaper with an average daily print circulation of 18,000.
-
Alan
 Kuntz and Ron Alterovitz attend the Hamlyn Symposium on Medical Robotics in London. Alan presents experimental results on the robotic lung biopsy system and Ron presents at the workshop: Towards Clinical Impact In Robotic Assisted Neuro And Skull-Base Surgery.
Kuntz and Ron Alterovitz attend the Hamlyn Symposium on Medical Robotics in London. Alan presents experimental results on the robotic lung biopsy system and Ron presents at the workshop: Towards Clinical Impact In Robotic Assisted Neuro And Skull-Base Surgery.
- We
 welcome the newest addition to the UNC-Chapel Hill Robotics Lab: the Fetch mobile manipulator. This new Fetch robot joins our Baxter robot, Nao robot, concentric tube robot, and steerable needle robot in the lab.
welcome the newest addition to the UNC-Chapel Hill Robotics Lab: the Fetch mobile manipulator. This new Fetch robot joins our Baxter robot, Nao robot, concentric tube robot, and steerable needle robot in the lab.
- Chris Bowen presents his paper on Asymptotically Optimal Motion Planning for Tasks Using Learned Virtual Landmarks at the 2016 International Conference on Robotics and Automation (ICRA) in Stockholm, Sweden. This paper was selected for publication in the first volume of the new journal IEEE Robotics and Automation Letters.
- We file two patent applications with the United States Patent Office based on research in our lab. The first covers aspects of the bronchoscope-deployed steerable needle system for early-stage lung cancer diagnosis. The second covers aspects of a novel user interface for safe teleoperation of tentacle-like robots for medical procedures.
- Ron Alterovitz discusses medical robotics at the Cultural Event on Leading Innovation: Inventing the Future with Science, which was held at Salem College, the oldest women’s college in the United States.
2015
- The research group celebrates 5 journal articles that appeared in print in 2015, spanning top-tier journals in robotics, automation, and neurosurgery.
- We receive a 3-year award from NSF to develop parallel and distributed motion planning algorithms for robots.
- Our paper on the Stochastic Motion Roadmap from 2007 was ranked in 2015 as a top 20 most cited paper from RSS in the last 10 years.
- Undergraduate student Cenk Baykal and graduate student Alan Kuntz present their papers at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) held in Hamburg Germany. In addition, Ron Alterovitz presents at the Workshop on Navigation and Actuation of Flexible Instruments in Medical Applications.
- Ron
 Alterovitz participates in the Seminar on Multimodal Manipulation Under Uncertainty at Schloss Dagstuhl at the Leibniz Center for Informatics.
Alterovitz participates in the Seminar on Multimodal Manipulation Under Uncertainty at Schloss Dagstuhl at the Leibniz Center for Informatics.
- Our paper on "Surface Registration in the Presence of Missing Patches and Topology Change" won the Best Paper Award at the 2015 Medical Image Understanding and Analysis Conference! Congratulations to the first author graduate student Qingyu Zhao and the rest of the team!
- Our paper on "Transoral Steerable Needles in the Lung: How Non-annular Concentric Tube Robots Can Improve Targeting" won the Best Oral Presentation Award at the 2015 Hamlyn Symposium on Medical Robotics! The paper was presented by Phil Swaney from Vanderbilt as part of a UNC-Chapel Hill/Vanderbilt collaboration funded by NIH on developing a lung biopsy system.
- Alan Kuntz presents a paper co-authored with Luis Torres and other collaborators from the group at the IEEE International Conference on Robotics and Automation (ICRA) in Seattle.
- Our research on medical robots for lung biopsy and skull base surgery is featured in a video segment titled "Snakelike robotic device fighting cancer" created by Ivanhoe Broadcast News. The segment was aired on media with a circulation (unique monthly viewers) of over 1 million, including local news TV shows in Texas, Pennsylvania, Michigan, and Alabama in April 2015.
- A video from our research group is featured in Forbes on "Robots and Real-World Variability: When Change Happens, Adapt."
- Our research is featured on ExitEvent, which provides news, information, and tools for emerging companies and investors in North Carolina: "Meet the UNC Researchers Behind Sugar-Scooping, Surgery-Performing, Self-Driving Robots.”
- We receive an international supplement award from NSF to support international collaboration on demonstration-guided motion planning for robotics.
- Ron Alterovitz is invited to give a presentation at the Association for Advancing Automation (A3) Business Forum in Orlando, Florida.
- Congratulations to undergraduate researcher Cenk Baykal who was selected as a Finalist for the Computing Research Association's (CRA) Outstanding Undergraduate Male Researcher Award! For this award, Cenk placed in the top 6 male students from Ph.D. granting institutions nationally.
2014
- Chris
 Bowen and Wen Sun each present their papers at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) held in Chicago.
Bowen and Wen Sun each present their papers at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) held in Chicago.
- At the Workshop on the Algorithmic Foundations of Robotics (WAFR) held in Istanbul, Turkey, Jeff Ichnowski presents his paper on fast nearest neighbor searching and Wen Sun presents his paper on Stochastic Extended LQR for motion planning under uncertainty.
- Research from the Computational Robotics Group is featured in an article published in the UNC School of Medicine's Vital Signs newsletter and featured as a Spotlight Story on UNC-Chapel Hill's main web page. Congratulations to everyone in the group who participated in the featured research!
- The Computational Robotics Group had 4 papers accepted to the 2014 IEEE International Conference on Robotics and Automation (ICRA). Congratulations to Jeff Ichnowski, Wen Sun, Luis Torres, and Cenk Baykal as well as group alumnus Sachin Patil for co-authoring accepted papers!
- Ron Alterovitz discusses the lab's research in an interview for American Scientist, a magazine about science, engineering, and technology published by Sigma Xi, The Scientific Research Society.
2013
- At
 the 2013 International Symposium on Robotics Research (ISRR) held in Singapore, Wen Sun and Ron Alterovitz present their paper on motion planning under uncertainty for robotic manipulators.
The paper was co-authored by Wen and Ron as well as Luis Torres and Jur van den Berg.
the 2013 International Symposium on Robotics Research (ISRR) held in Singapore, Wen Sun and Ron Alterovitz present their paper on motion planning under uncertainty for robotic manipulators.
The paper was co-authored by Wen and Ron as well as Luis Torres and Jur van den Berg.
- We receive funding from NIH to lead a 2-year project to develop a new surgical robot capable of safely performing biopsies in difficult-to-reach sites in the lung for early-stage lung cancer diagnosis. The research team combines our group's expertise in robotics and motion planning together with the expertise of mechanical engineers (at Vanderbilt University) and physicians in cardiothoracic surgery and radiology (at the UNC School of Medicine).
- The
 Computational Robotics Group celebrates our recent NSF and NIH awards and takes a breather after our multiple submissions to the 2014 IEEE International Conference on Robotics Automation.
Computational Robotics Group celebrates our recent NSF and NIH awards and takes a breather after our multiple submissions to the 2014 IEEE International Conference on Robotics Automation. - Ron Alterovitz, Maxim Likhachev (CMU), and Sven Koenig (USC)
receive funding from the National Science Foundation (NSF) to co-organize a workshop titled
Robot Planning in the Real World: Research Challenges and Opportunities.
The objective is to bring together people from academia, industry, and government research agencies to discuss how the field of robot planning should progress to make robots less reliant on human supervision and more widely deployable in the real world.
- As part of a team including the GAMMA, tele-presence, and computer vision groups at UNC, the Computational Robotics Group receives funding from NSF's Computing Research Infrastructure program to purchase large-scale robotics equipment. The group is looking forward to adding new robotics hardware to the lab!
- We receive funding from NIH for a 4-year project to develop a new endonasal surgical robot capable of accessing difficult-to-reach sites in the brain for cancer surgery and treatment. The project is in collaboration with mechanical engineering and neurosurgery teams at Vanderbilt University. Our focus will be on motion planning algorithms and software for the new medical device.
- Ron Alterovitz
 discusses the lab's research on Radio In Vivo, a weekly science radio program that airs on radio station WCOM-FM 103.5 in Chapel Hill/Carrboro, NC. Listen to a podcast of the show here.
discusses the lab's research on Radio In Vivo, a weekly science radio program that airs on radio station WCOM-FM 103.5 in Chapel Hill/Carrboro, NC. Listen to a podcast of the show here. - The
 lab welcomes its newest member: Baxter. This robot, created by Rethink Robotics, has 2 adult-scale arms each with 7 degrees of freedom. The arms are compliant, which means the robot is safe to operate in environments with people. Baxter joins the Aldebaran Nao child-size humanoid robot and miscellaneous prototype medical robots already in the lab. Baxter will enable us to pursue new research in motion planning for robots that assist humans in homes and workplaces.
lab welcomes its newest member: Baxter. This robot, created by Rethink Robotics, has 2 adult-scale arms each with 7 degrees of freedom. The arms are compliant, which means the robot is safe to operate in environments with people. Baxter joins the Aldebaran Nao child-size humanoid robot and miscellaneous prototype medical robots already in the lab. Baxter will enable us to pursue new research in motion planning for robots that assist humans in homes and workplaces. - Congratulations to Luis Torres, whose project on motion planning was selected for the Google Summer of Code. Luis will develop new extensions for the Open Motion Planning Library (OMPL), a widely used open source motion planning library.
- A
 paper by lab alumni Edgar Lobaton and Jinghua Fu as well as current lab members Luis Torres and Ron Alterovitz is presented orally at the IEEE International Conference on Robotics and Automation (ICRA) in Karlsruhe, Germany. The paper presented a new method for estimating the shape of a continuum robot (such as a steerable needle or concentric tube robot) continuously over the course of a procedure using a minimal number of x-ray images.
paper by lab alumni Edgar Lobaton and Jinghua Fu as well as current lab members Luis Torres and Ron Alterovitz is presented orally at the IEEE International Conference on Robotics and Automation (ICRA) in Karlsruhe, Germany. The paper presented a new method for estimating the shape of a continuum robot (such as a steerable needle or concentric tube robot) continuously over the course of a procedure using a minimal number of x-ray images. - We receive funding from NIH for a 5-year project to improve treatment planning for radiation therapy by integrating information from different imaging modalities. The research team is led by PI Julian Rosenman from Radiation Oncology and includes Co-PI's Ron Alterovitz, Jan-Michael Frahm, Marc Niethammer, and Stephen Pizer from Computer Science.
- Ron Alterovitz is selected for the UNC-Chapel Hill Computer Science Department's Excellence in Teaching Award by the Computer Science Graduate Student Association. This is the second time Ron has been selected for this award.
2012
- Sachin Patil
 successfully defends his Ph.D. thesis on closed-loop planning and control of steerable needles. We celebrate at the Top of the Hill restaurant. Sachin will start as a post-doc at the University of California, Berkeley.
successfully defends his Ph.D. thesis on closed-loop planning and control of steerable needles. We celebrate at the Top of the Hill restaurant. Sachin will start as a post-doc at the University of California, Berkeley. - Research
 from the Computational Robotics Group is featured in an article published in the Carolina Arts & Sciences magazine and in Endeavors magazine. Congratulations to everyone in the group who participated in the featured research!
from the Computational Robotics Group is featured in an article published in the Carolina Arts & Sciences magazine and in Endeavors magazine. Congratulations to everyone in the group who participated in the featured research! - Results by Jur van den Berg, Sachin Patil, and Ron Alterovitz on motion planning under uncertainty using optimization in belief space are published in the International Journal of Robotics Research, one of the top journals in robotics.
- Congratulations to Jeff Ichnowski and Luis Torres for their newly accepted papers. Jeff's paper introduces PRRT*, a fast motion planning algorithm that leverages multi-core CPU parallelization. Luis's paper introduces a new algorithm for optimizing the design of concentric tube robots using mechanically-accurate models. Both papers will be presented at the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) in Faro, Portugal.
- At
 the Robotics: Science and Systems (RSS) conference held in Sydney, Australia, Ron Alterovitz co-organizes the Workshop on Algorithmic Frontiers in Medical Robotics and presents at the Workshop on Stochastic Motion Planning and Information-Based Control.
the Robotics: Science and Systems (RSS) conference held in Sydney, Australia, Ron Alterovitz co-organizes the Workshop on Algorithmic Frontiers in Medical Robotics and presents at the Workshop on Stochastic Motion Planning and Information-Based Control. - Congratulations to Sachin Patil and collaborator Jur van den Berg for their newly accepted paper on efficient approximate value iteration for continuous Gaussian POMDPs, which will be presented at the AAAI Conference (AAAI-12) in Toronto, Canada.
- Ron Alterovitz
 answers questions about robotics at the post-performance panel discussion of Alan Ayckbourn's Henceforward…, a play involving a robot in a futuristic society. [Photo: Ron on the set with Artistic Director Paul Frellick of the Deep Dish Theater Company in Chapel Hill, NC.]
answers questions about robotics at the post-performance panel discussion of Alan Ayckbourn's Henceforward…, a play involving a robot in a futuristic society. [Photo: Ron on the set with Artistic Director Paul Frellick of the Deep Dish Theater Company in Chapel Hill, NC.] - Farewell reception for MS graduates Eric Boren and Jinghua Fu and BS graduates Nate Dierk and Sandeep Kasoji. Congratulations!
- Chris Bowen
 and Ron Alterovitz watch the FIRST Robotics NC Regional Tournament high school competition in Raleigh, NC. Chris Bowen served as an advisor and mentor to the Green Villains, who are on their way to the national tournament.
and Ron Alterovitz watch the FIRST Robotics NC Regional Tournament high school competition in Raleigh, NC. Chris Bowen served as an advisor and mentor to the Green Villains, who are on their way to the national tournament. - Ron Alterovitz is selected to receive a National Science Foundation (NSF) Early Career Development (CAREER) award. According to NSF, these are NSF's "most prestigious awards in support of junior faculty who exemplify the role of teacher-scholars through outstanding research, excellent education, and the integration of education and research."
- Congratulations to Sachin Patil, Jur van den Berg, and Ron Alterovitz whose paper on motion planning under uncertainty was accepted for oral presentation at the 2012 IEEE International Conference on Robotics and Automation.
- Ron Alterovitz invited to present the group's research on automatic motion planning for medical steerable needles at the workshop on "Pathways to Clinical Needle Steering: Recent Advances and Future Applications" to be held at the 2012 IEEE International Conference on Robotics and Automation in Minneapolis, Minnesota in May 2012.
2011
- Group alumnus Edgar Lobaton presents his paper on topological visual features for images with deforming objects at the International Conference on Computer Vision (ICCV) in Barcelona, Spain. This collaborative effort spans UNC-Chapel Hill, NCSU, and UC Berkeley.
- Two group members present at the SACNAS National Conference (Society for the Advancement of Chicanos and Native Americans in Science) held in San Jose, CA. Ron Alterovitz judges posters and gives an Invited Talk on Computing Motions for Healthcare Robots and Luis Torres presents a research poster on motion planning for concentric tube robots.
- Congratulations to Nate Dierk, who is selected for the Honors Undergraduate Research Award. This award provides funding for his undergraduate senior project on extending algorithms for motion planning for concentric tube robots.
- Luis Torres
 presents his paper on motion planning for concentric tube robots at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) held in San Francisco, CA. Undergraduate student Nate Dierk, who contributed valuable visualizations to the projects, attends as well.
presents his paper on motion planning for concentric tube robots at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) held in San Francisco, CA. Undergraduate student Nate Dierk, who contributed valuable visualizations to the projects, attends as well. - Ron Alterovitz and Maxim Likhachev co-organize a "50 Years of Robotics" Special Symposium on "Robot Motion Planning: Achievements and Emerging Approaches" at IROS in San Francisco, CA. The keynote speaker is motion planning pioneer Prof. Tomas Lozano-Perez from MIT.
- We receive a 3-year award from NSF to develop motion planning methods for robots that will assist the elderly and disabled with activities of daily living. The project is in collaboration with Dinesh Manocha from Computer Science and Jennifer Womack from the Division of Occupational Sciences and Therapy at UNC's School of Medicine.
- Two
 papers from our group are selected for presentation at the 2011 International Symposium on Robotics Research (ISRR). The conference is held in Flagstaff, Arizona, and includes an excursion to a NASA desert test site and the Grand Canyon.
papers from our group are selected for presentation at the 2011 International Symposium on Robotics Research (ISRR). The conference is held in Flagstaff, Arizona, and includes an excursion to a NASA desert test site and the Grand Canyon.
- Farewell
 lunch for postdoctoral researcher Edgar Lobaton, who will be starting as an Assistant Professor at North Carolina State University.
lunch for postdoctoral researcher Edgar Lobaton, who will be starting as an Assistant Professor at North Carolina State University.
- Sachin Patil, Jur van den Berg, and Ron Alterovitz's paper on motion planning under uncertainty in deformable environments is selected for full oral presentation at the Robotics: Science and Systems (RSS) conference; only 8.7% of submissions are given a full 30-minute slot.
- Farewell
 lunch for postdoctoral researcher Jur van den Berg, who will be starting as an Assistant Professor at the University of Utah, and Gu Ye, who will be starting at Google.
lunch for postdoctoral researcher Jur van den Berg, who will be starting as an Assistant Professor at the University of Utah, and Gu Ye, who will be starting at Google.
- Luis Torres named TA of the Year in UNC's Computer Science Department!
- Pavel
 Chtcheprov defends his undergraduate thesis and graduates with Highest Honors!
Chtcheprov defends his undergraduate thesis and graduates with Highest Honors!
- We
 present 2 papers co-authored by Edgar Lobaton, Sachin Patil, Jinghe Zhang, Anya Derbakova, and Ron Alterovitz at the IEEE International Conference on Robotics and Automation (ICRA) in Shanghai, China.
present 2 papers co-authored by Edgar Lobaton, Sachin Patil, Jinghe Zhang, Anya Derbakova, and Ron Alterovitz at the IEEE International Conference on Robotics and Automation (ICRA) in Shanghai, China.
- Luis Torres wins an NSF Graduate Research Fellowship!
2010
- Jur
 van den Berg presents paper co-authored by Sachin Patil, Ron Alterovitz, and collaborators from Berkeley on LQG-based planning, sensing, and control of steerable needles at the Workshop on the Algorithmic Foundations of Robotics (WAFR) held in Singapore. The flight from Chapel Hill takes more than 24 hours!
van den Berg presents paper co-authored by Sachin Patil, Ron Alterovitz, and collaborators from Berkeley on LQG-based planning, sensing, and control of steerable needles at the Workshop on the Algorithmic Foundations of Robotics (WAFR) held in Singapore. The flight from Chapel Hill takes more than 24 hours!
- Our research on robotic surgical assistants is featured in US News & World Report in the article Teaching Medical Robots: Research Aims to Make Robots Smarter.
- The
 United States Patent and Trademark Office awards a patent on steerable needle technology to co-inventor Ron Alterovitz and collaborators at the Johns Hopkins University, Vanderbilt University, and University of California, Berkeley.
United States Patent and Trademark Office awards a patent on steerable needle technology to co-inventor Ron Alterovitz and collaborators at the Johns Hopkins University, Vanderbilt University, and University of California, Berkeley.
- Sachin Patil presents paper on interactive motion planning for steerable needles at the IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob) in Tokyo, Japan.
- Edgar Lobaton's paper on occlusion detection under deformations is selected for oral presentation at the 2010 European Conference on Computer Vision (ECCV); only 3.2% of submitted papers are presented orally.
- Pavel Chtcheprov selected for the Sarah Steele Danhoff Undergraduate Research Award, which provides funding for his undergraduate honors thesis on designing and building a low-cost robot platform for medical robotics research.
- Ron
 Alterovitz co-organizes the Workshop on Medical Cyber-Physical Systems at the IEEE International Conference on Robotics and Automation (ICRA) in Anchorage, Alaska together with Cenk Cavusoglu, Ken Goldberg, and Blake Hannaford. The workshop attracts over 50 international researchers from industry and academia and concludes with a keynote talk by the Dr. Simon DiMaio, Manager of Applied Research at Intuitive Surgical, Inc.
Alterovitz co-organizes the Workshop on Medical Cyber-Physical Systems at the IEEE International Conference on Robotics and Automation (ICRA) in Anchorage, Alaska together with Cenk Cavusoglu, Ken Goldberg, and Blake Hannaford. The workshop attracts over 50 international researchers from industry and academia and concludes with a keynote talk by the Dr. Simon DiMaio, Manager of Applied Research at Intuitive Surgical, Inc.
- Two papers co-authored by Sachin Patil, Lisa Lyons, and Ron Alterovitz selected for presentation at the IEEE International Conference on Robotics and Automation (ICRA) in Anchorage, Alaska.
- We receive a 2-year award from NIH to develop motion planning methods for medical steerable needles in collaboration with Prof. Bob Webster and the MEDLab at Vanderbilt Unviersity.
- Ron Alterovitz is selected for the department's Excellence in Teaching Award by UNC-Chapel Hill's Computer Science Students Association (CSSA).
- Edgar Lobaton joins the group through an award from the Computing Innovations Fellows Project funded by NSF. Fewer than 12% of applications were selected for this award.
2009
- Lisa Lyons presents paper on motion planning for concentric robots using an optimization-based method at the IEEE International Conference on Intelligent Robots and Systems (IROS) held in St. Louis, MO.
- Journal article in BMC Bioinformatics designated as Highly Accessed, which is used to identify "articles that have been especially highly accessed, relative to their age".
- We receive a 4-year award from NSF to conduct research on "Robust Intelligent Manipulation and Apprenticeship Learning for Robotic Surgical Assistants" in collaboration with Case Western Reserve University and the University of California, Berkeley.
- Image
 from our SIGGRAPH 2009 article on simulating medical needle insertion procedures is featured on the back cover of ACM Transactions on Graphics.
from our SIGGRAPH 2009 article on simulating medical needle insertion procedures is featured on the back cover of ACM Transactions on Graphics.
- Paper on guiding medical needles using tissue manipulation is selected as a Finalist for the Intuitive Surgical Best Paper Award at the IEEE International Conference on Robotics and Automation in Kobe, Japan.
About | Projects | People | Publications | Contact